
Motion planning and tracking control of unmanned underwater vehicles: technologies, challenges and prospects


Abstract
The motion planning and tracking control techniques of unmanned underwater vehicles (UUV) are fundamentally significant for efficient and robust UUV navigation, which is crucial for underwater rescue, facility maintenance, marine resource exploration, aquatic recreation, etc. Studies on UUV motion planning and tracking control have been growing rapidly worldwide, which are usually sorted into the following topics: task assignment of the multi-UUV system, UUV path planning, and UUV trajectory tracking. This paper provides a comprehensive review of conventional and intelligent technologies for motion planning and tracking control of UUVs. Analysis of the benefits and drawbacks of these various methodologies in literature is presented. In addition, the challenges and prospects of UUV motion planning and tracking control are provided as possible developments for future research.
Keywords
1. Introduction
More attention has been concentrated on underwater navigation this century due to the abundant resources buried in the deep-sea area, such as biological, mineral, and space resources [1]. Therefore, underwater vehicles (UV) have been applied due to their adaptiveness and safety when exploring undersea environments. The vehicle can tackle the problems of hardly -predictable obstacles, current flow, and hydraulic pressure as well as provide longer operating time and more functions than human divers [2, 3].
Meanwhile, unmanned underwater vehicles (UUVs) are being developed, which can be divided into remote-operated vehicles (ROVs) and autonomous underwater vehicles (AUVs). The motion planning and tracking control of UUVs are assumed to be significant technologies for accomplishing efficient underwater navigation with a guaranteed response time and without direct contact with marine dangers. Research on the underwater motion planning and tracking control of UUVs originated decades ago and has been under the spotlight in recent years. The history of UUVs can be traced back to the mid-20th century when an unmanned vehicle was invented by the US Navy to recover a hydrogen bomb lost off the coast of Spain [4]. In 2009, the success of finding cracked pieces of Air France 447 realized by a UUV verified the vehicle's promising application in underwater navigation. In 2014, the search for flight MH370 also brought out the growing attention on demanding underwater navigation, which highly depends on UUV motion planning and tracking control technologies [5]. Nowadays, detecting deep into the ocean area for digging more available resources such as undersea oil development also requires the continuous progress of the UUV motion planning and tracking control [6].
According to the statistics collected by Web of Science, the number of organizations that devote efforts to underwater vehicle research has impressively increased in the past years. This trend corresponds to the growing demand for underwater navigation worldwide, where studies of underwater motion planning and tracking control are regarded as hot topics among UUV research projects. Underwater motion planning and tracking control form the most crucial part of underwater navigation. UUV motion planning is established on conventional or intelligent technologies of vehicle posture planning, task assignment, and path planning, while UUV tracking control is mainly about vehicle trajectory tracking. The paper focuses on UUV task assignment, path planning, and trajectory tracking controls. Task assignment is designed for the multi-UUV system, where multiple vehicles are arranged simultaneously to achieve the most efficient collective navigating plan without mutual interference; the path planning of UUVs aims at giving the optimal instruction to the vehicle for arriving at the target, which can largely save the time and reduce the energy consumption; and trajectory tracking study of UUVs guarantees the robustness and manner of the vehicle operation in practical cases. However, studies related to underwater motion planning and tracking control have not been thoroughly investigated due to the complexity of the ocean environment and the vehicle system [7, 8]. In addition, to overcome the difficulty of accomplishing complex underwater operations, the multi-UUV system, which refers to the system of multiple UUVs and multiple targets, has pulled great attention owing to its high parallelism, robustness, and efficiency [9-11].
Motivated by the goal of realizing efficient and robust UUV navigation in ocean environments, studies related to the UUV motion planning and tracking controls should be systematically surveyed and discussed to address their potential in applications. Meanwhile, progress in this field can be promoted by analyzing the deficiency and possible developments of the relevant technologies. Therefore, the contribution of the paper is to collect and analyze technologies that have been and can be applied to the motion planning and tracking control of UUVs. The benefits and drawbacks of these technologies are discussed, and challenges and prospects are derived based on the gap in the literature. These analyses and conclusions are supposed to provide a brief overview of studies that can be developed on certain issues for researchers at the entry level in the field of UUV motion planning and tracking control.
In this paper, a brief review of the technologies regarding the UUV motion planning and tracking control is proposed. The review investigates the current development of the motion planning and tracking control achieved by UUVs and then derives the challenges as well as possible prospects of the study. The introduction is given in Section 1. In Sections 2 and 3, the current research status is described. Methodologies of UUV motion planning are organized into divisions of task assignment and path planning. In the tracking control section, the trajectory tracking methods of the UUV are surveyed. In Section 4, challenges and possible prospects are concluded and discussed.
2. Technologies of UUV Motion Planning
In this section, technologies for motion planning of UUVs are presented. Motion planning of UUVs can be mainly categorized into steps of task assignment and path planning, where the path planning is usually split into point-to-point path planning and full-coverage path planning.
Underwater motion planning is the crucial part that decides the efficiency of a UUV navigation. The optimal vehicle motion has to be addressed in the requirement of the shortest total distance and time to arrive at the target. As shown by the underwater motion planning scenario in Figure 1, under the effect of ocean currents and obstacles, for the multi-UUV system, the optimal task assignment between multiple vehicles (in orange) upon multiple targets (in the red triangle) is considered as the preparation for assessing satisfactory planned paths. For the UUV path planning, the point-to-point path planning decides the initial navigation path from the vehicle to the target, while the full-coverage path planning instructs the vehicle's traversing operation after arriving at the target area (area within the black circle).
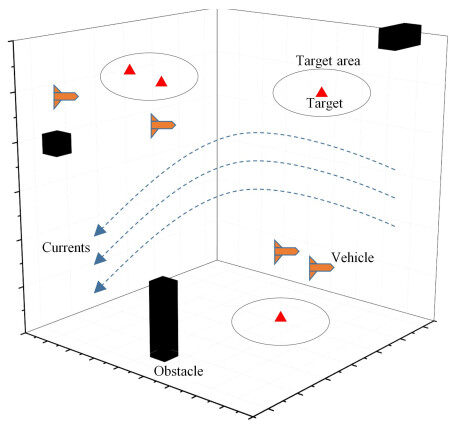
Figure 1. The underwater motion planning scenario of the UUV.
2.1. Task assignment of Multi-UUV system
Originated from the last century, strategies applied to the task assignment of the multi-UUV system are mostly realized by directly imitating animal behaviors. These assignments are designed through sensor-collected information, and the vehicle tasks are arranged referring to actual creature grouping behaviors [12, 13]. Mataric et al. proposed a task assignment algorithm that imitates the animal grouping behaviors such as swarming and distributing [14]. Parkers established a distributed system that divides the assignment into smaller computing sections based on vehicle behaviors [12]. Miyata developed a behavior-based algorithm that independently assigned the task for vehicles based on the time priority [15]. These studies verify the directness, simple operating procedure, and no delays of behavior-based algorithms. However, they stay at the low administrative levels of imitation, which are short of self-regulation/optimization, and the unsatisfactory collaboration leads to the inefficiency of the algorithm and the requirement of intelligent task assignment methods.
Agent-based algorithms have been commonly applied to the task assignment of the multi-vehicle system [16-18]. In the agent-based task assignment algorithm, the whole system is assumed to be an economy entity, while each vehicle works as an agent. The agent-based algorithms are regarded as decentralized approaches, as each vehicle agent is supposed to know its requirement and limitation, and the final solution is deduced based on the balance between them. The task assigned to each agent is balanced after the repeated computation and comparison of the cost to their targets; therefore, the minor consumption and the largest profit for the whole entity can be obtained at the end [19]. The agent-based algorithms such as the auction algorithm resolve the task assignment problem of known targets efficiently; however, they do not work well in the vehicle assignment problem of unknown targets [20, 21]. Yao applied the biased min-consensus (BMC) method, which introduces the edge weight into the standard min-consensus protocol. Yao achieved the path planning of simultaneous arrival for all UUVs through this agent-based task assignment algorithm, yet the situation of unknown targets is still not developed [22, 23].
Intelligent methods such as swarm intelligence, genetic algorithm (GA), and neural network (NN) have been tested in solving the problem of the multi-vehicle task assignment [24-26]. These intelligent methods find the best task assignment solution by the objective function established on the total searching length and the heuristic cost through iteration algorithms. In recent years, the self-organizing map (SOM), an NN-based algorithm, was applied to the task assignment problem of a multi-vehicle system due to the competitiveness and self-improving features of the neural network [27]. The SOM-based task assignment algorithm guarantees that each vehicle in the multi-vehicle system can navigate along the shortest path to their target while maintaining the shortest total navigation cost for the whole system, whose structure is shown in Figure 2. The target locations serve as the inputs while the vehicle positions and paths are the outputs of the network, and the network is updated by the weights between layers that are deduced based on distances between targets and vehicles [28]. The turning direction angle and turning radius of the vehicle are then involved on the basis of the SOM method due to the vehicle's practical requirement of reducing the energy cost by reaching the target in a smooth curve in the task assignment problem [29, 30].
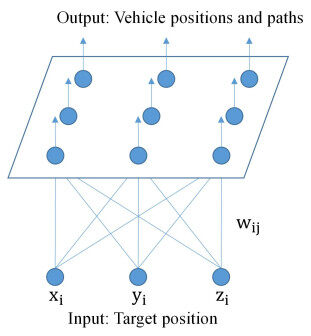
Figure 2. Structure of the SOM algorithm.
However, the task assignment algorithms considering the underwater environment are still not thoroughly investigated due to the complex environmental factors and the nonlinear UUV system. Considering the complexity of the underwater environment such as the currents effect, Chow proposed an improved K-means algorithm to simultaneously resolve the task assignment and path planning problems for the multi-UUV system under the static ocean currents effect, where the vehicle successfully reached the target along smooth curves on the basis of optimal task assignment [31]. Nevertheless, the method does not work well for moving targets, and it lacks the discussion of applications under the 3D static ocean currents effect as well as the dynamic currents condition. Zhu et al. introduced SOM into the multi-UUV system and combined SOM with a velocity synthesis algorithm; hence, the task assignment and path planning problem for the multi-UUV system under time-varying ocean currents when chasing both static or dynamic targets could be addressed, which resolved the issues that existed in Chow's study. However, neither SOM-based methods could realize satisfactory collision avoidance [32].
Methods that have been applied to the task assignment of the multi-UUV system are listed in Table 1. Details of various intelligent methods for task assignment of UUVs can be found in Section 2.1. Gaps are still left for relative studies, which can be mainly concluded into two problems. The first problem is the difference among heterogeneous UUVs. They have different model parameters, navigating velocities or safe distances such that the assignment of parameters for every single UUV is not consistent in the practical application. The other problem is the effect of the underwater environmental factors such as the obstacles and the fluid effect, which may produce inevitable deviations or too many dynamic requirements for vehicles in the task assignment.
Algorithms for task assignment of multi-vehicle system
| Behavior imitation algorithms [12-15] | Simple imitation of the animal (including human) grouping behaviors such as swarming and distributing behaviors | (1) Easy to implement (2) React without lags | (1) Low efficiency (2) Cannot regulate themselves (3) Difficult to optimize |
| Agent-based algorithms [16-23] | (1) Assume the whole system as an economy entity while each vehicle works as an agent (2) Assign the task to each agent in the goal of gaining lowest cost for the whole entity | (1) Easy to implement (2) Satisfactory efficiency when resolving problems of known targets | Do not work well in the task assignment of unknown targets |
| Intelligent algorithms [24-30] (GA- or NN-based) | (1) Regard the task assignment as a search optimization problem (2) Take the searching distance as the objective function (3) Optimize through iterations | Outstanding adaptiveness due to consideration of the UUV system or environmental factors in the objective function | (1) Unsatisfactory real-time reaction owing to the computation complexity (2) Local minimum |
2.2. Path planning of UUV
In this section, current methodologies developed for the path planning of the UUV system under different application cases are presented and concluded, divided into subsections on point-to-point path planning and full-coverage path planning.
2.2.1. Point-to-Point path planning
After completion of the task assignment, the UUV is required to navigate to the supposed destination position from its current position with: (1) an optimized path of shortest distance; and (2) avoidance of obstacles, which is described as the point-to-point path planning problem. Conventional map building methods such as grid-based modeling and topological approaches are used in the point-to-point path planning. Nowadays, typical methods that are applied in the UUV point-to-point path planning also include artificial potential field methods and a wide range of intelligent path planning algorithms.
Map building Method Map building methods plan the path by mapping the vehicle's surrounding area and then deriving the optimal solution accordingly. Based on the area information collected by the vehicle sensors such as the obstacle occupied status, different methodologies of mapping these areas can be addressed and deduce an efficient path solution accordingly. The fundamental part of map building methods such as mapping the vehicle searching area usually serves as the basis of most path planning algorithms, such as intelligent algorithms. However, in this section, the map building methods are limited to those that directly deduce on the map form without the combination of complex strategies such as self-regulation or self-evolution.
One typical map building method is called the visibility graph approach, where the graph is established on the connection of the vehicle, polygonal obstacle vertex, and the destination without crossing the obstacles [33]. The optimal path is determined by finding the route between the origin point and the destination point that has the shortest distance. The visibility graph approach derives the shortest path, yet it consumes long searching time and lacks flexibility, as the graph has to be reconstructed once the environmental information changes, such as the destination position or the obstacle shapes. Moreover, the visibility graph approach does not work for circular obstacles. The tangent graph method gives a more efficient path planning solution of shorter distance by controlling the vehicle to navigate along the tangent lines of obstacles [34]. However, the vehicle needs to approach the obstacle as close as possible when navigating along the tangent lines such that collisions might be produced in practical cases. The Voronoi diagram method resolves the collision problem through the combination of lines and parabolas, as shown in Figure 3, where the line is defined by the vertex of obstacles, while the parabola is defined by a vertex and a sideline of obstacle [35, 36].
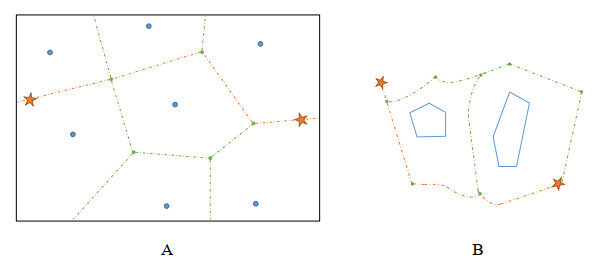
Figure 3. Typical Voronoi diagrams with the indicated graph branch nodes and optimal point-connected path: (A) obstacles in points; and (B) obstacles in convex polygons. Orange stars: Starts and ends of the path.
Grid-based path planning methods are also the widely used type of map building method. They decompose the surrounding area into nonoverlapping but connected cells, and then the optimal path is addressed between the origin and the destination cells without collisions. Dijkstra algorithm is one of the earliest grid-based path planning methods where a global search on all possible path solutions is required such that large computation is inevitable [37]. Therefore, A* algorithm is proposed with the advancement of adding the heuristic cost to reduce the searching space [38]. However, typical underwater disturbances such as the effect of currents might bring inevitable influence on UUV path planning; hence, the traditional grid-based path planning methods that need map of high accuracy and consistency are not appropriate to the UUV system [39, 40].
Artificial Potential Field Method The artificial potential field (APF) method is established on a virtual artificial potential predefined field. The proposed destination is determined as the object that has the attraction to the vehicle, while the obstacles are regarded as the objects that generate repulsive force to the vehicle [41]. All the attractive and repulsive forces are quantified and presented in the form of gravity, where the positive gravity is correlated with the distance between the vehicle position and the destination, and negative gravity is performed within the domain of the obstacles. As the vehicle is closer to the destination, the gravity decreases until it reaches the destination. Deduced by the negative gradient of respective fields, the attractive force
where
Therefore, the destination has the lowest gravity field but the highest gravity force for attraction, while the gravity field for the obstacles performs higher such that the vehicle can flow along the gravity field descending route to complete the optimal path planning, as the path deduced from the point in Figure 4A to the one in Figure 4C.
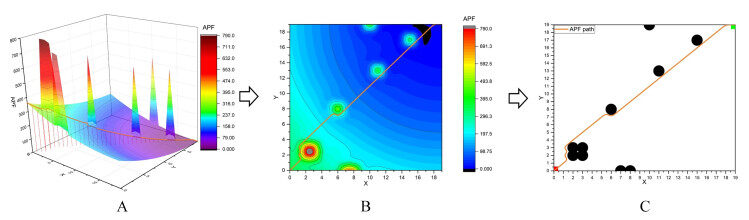
Figure 4. Path derived by the APF method on the 2D modeling map: (A) path planning based on the distribution of the APF on the map; (B) APF path on the contour map; and (C) final APF path presented on the 2D modeling map [42].
The APF reduces the calculation complexity as well as performs outstanding real-time reactions, which is widely applied in the area of vehicle path planning. The virtual gravitational potential field realizes a fast calculation of the most optimal path to the target without collisions for the vehicle, by following the guidance of resultant forces given by the pre-designed attraction and repulsion [43]. Zhou et al. improved the APF method with a particle swarm algorithm to increase the pathfinding efficiency for tangent navigating robots [44]. Lin et al. designed a subgoal algorithm for the APF such that the path planning of the unmanned vehicle can overcome the local minimum and track the most optimal path [45]. The decision tree was added to the APF to form the efficient path planning algorithm without local minimum and collisions for vehicles [46]. Regarding the environmental factors, the effect of ocean currents was then involved in the path planning of the UUV while using the APF method [42].
However, most of the APF research do not involve environmental disturbance in the design, thus affecting the practical application of the APF. Moreover, the APF method for vehicle path planning often deduces the problem of local minimum, where the vehicle might stick at halfway instead of reaching the target position due to the larger resultant effect produced by the local minimum point [47]. The large computation complexity caused by the increasing obstacle numbers also affects the planning efficiency of the APF method.
Intelligent Path Planning Method More and more artificial intelligence methods have been applied in the studies of UUV path planning in recent years, covering the genetic algorithm, swarm intelligence, fuzzy logic, and neural network algorithm.
The genetic algorithm (GA) and ant colony algorithm (ACO) were widely used in the early times for underwater path planning. The GA method imitates the natural selection and evolution procedure to provide the optimal solution through iterations, which has been involved in the path planning and obstacle avoidance under the underwater environment of dynamic currents effect [48, 49]. The ACO method belongs to the swarm intelligence algorithm, where it is designed based on the swarm behavior of ant groups while chasing food, and the ant behavior-based intelligent method has been proved to work well in the UUV global path planning [50, 51]. The swarm intelligence methods have been broadly applied in UUV path planning in recent years due to their simple implementation, fast convergence speed, and satisfactory robustness when modeling based on different swarming animal groups [52]. The swarm intelligence algorithms provide outstanding performance in the path planning of UUVs, yet the local minimum problem can be produced by this intelligent method, which finally leads to premature execution before reaching the destination.
Fuzzy logic performs well in the UUV path planning and obstacle avoidance owing to its expertise in processing the information uncertainty as the underwater environment is of high uncertainty and incompleteness [53, 54]. Kim et al. used the fuzzy logic-based algorithm to deduce the turning direction and angle of the UUV to avoid collisions and complete the path planning [55]. Ali developed a fuzzy ontology modeling method to realize the UUV path planning [56]. The fuzzy logic-based intelligent algorithm does not need to establish accurate mathematical models as it is derived from the human cognitive experience. Thus, fuzzy logic can retune itself during the navigation and overcome the local minimum problem. However, the fuzzy logic rule relies heavily on experts' experience and approximations, and unverified errors cannot be thoroughly avoided. The complexity of the dynamic environmental factors also challenges the adaptiveness of the fuzzy logic design [57].
The application of neural networks in vehicle path planning has obtained wide attention in recent decades [58]. Ghatee applied the Hopfield neural network in the optimization of path planning distances [59]. Li et al. proposed a bio-inspired neural network for vehicle path planning, where both optimal planning paths and collision avoidance are realized with high efficiency [60]. The bio-inspired neural network helps to derive the optimal path that is composed of the continuous coordinates of the vehicle movement, based on a grid-based map and its corresponding neural network model, where each grid represents a single neuron, as shown in Figure 5. The bio-inspired neural network algorithm continuously updates the state of neurons by transmitting the information through the network to give an instant reaction and reduces the complexity by limiting the searching area to a certain range. Therefore, the bio-inspired neural network path planning utilizes the preserved information in the neurons to update its planning design while adjusting the network on time such that it is well suited to the dynamic underwater environment, providing an efficient and high adaptive approach for the UUV path planning [61].
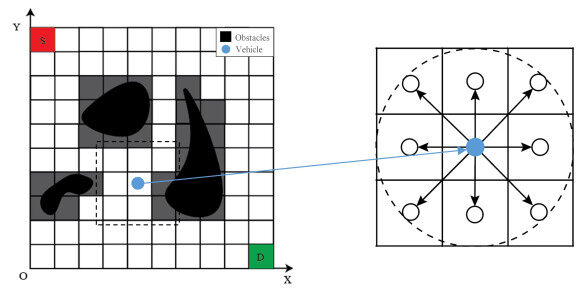
Figure 5. The 2D model of the bio-inspired neural network-based path planning algorithm. S, start; D, destination.
In recent years, the application of reinforcement learning (RL) in UUV path planning has grown quickly. The RL method updates the vehicle's states and converges to the optimal path planning solution by making actions according to rewards set based on the environment. RL-based path planning combined with APF for intervention AUVs has been developed to remove sea urchins at an affordable cost [62]. AUV path planning in a complex and changeable environment is achieved through the combination of RL and deep learning [63]. Wang et al. proposed a multi-behavior critic RL algorithm for AUV path planning to overcome problems associated with oscillating amplitudes and low learning efficiency in the early stages of training, and they reduced the time consumed by the RL algorithm convergence for avoiding obstacles [64]. However, the slow convergence issue of RL-based path planning methods still needs further investigation.
The methods that are commonly used in the point-to-point path planning of the UUV are summarized in Table 2, where their implement theory, benefits, and drawbacks are described. Details of various intelligent methods applied to the point-to-point path planning of a UUV can be found in the fourth part of Section 2.2.1.
Algorithms for UUV point-to-point path planning
| Map Building Method [33-40] | Visibility graph-based: (1) Establish as graph on the connection of the vehicle, polygonal obstacle vertex, and the destination without crossing the obstacles (2) Find the optimal path between the origin point and the destination point that has the shortest distance Grid-based: (1) Decompose the surrounding area into nonoverlapping but connected cells (2) Address the optimal path between the origin and the destination cells without collisions | (1) Easy to implement (2) Direct because of visible mapping | Visibility graph-based: (1) Long time consumption when establishing the graph (2) Lack of flexibility (3) Do not work for circular obstacles Grid-based: (1) Large computation (2) Lack of consideration of environmental disturbance |
| Artificial Potential Field [41-47] | (1) Predefine a virtual artificial potential field (2) Assume the destination provides the attractive force while obstacles generate repulsive force to the vehicle (3) Address the optimal path for the vehicle through the field descending route | (1) Simple mechanism (2) High efficiency and realtime reaction | (1) Local minimum (2) Sometimes induce large computation |
| Intelligent Path Planning Algorithms[48-52, 55-64] (GA, ACO, Fuzzy logic, NN, and RL) | (1) Regard the task assignment as a search optimization problem (2) Take the searching distance as the objective function (3) Optimize through iterations | (1) Easy to implement (2) Adaptiveness. | (1) Unsatisfactory real-time reaction owing to the computation complexity (2) Local minimum |
2.2.2. Full-coverage path planning
The full-coverage path planning has to be considered when the vehicle reaches the designated search area, where the global area of the searching map shall be covered. The goal of the full-coverage path planning for the UUV is to simultaneously realize the high coverage rate, the low repetition route, and the short navigating distance.
The random coverage strategy was proposed at early times to complete the full-coverage path planning. Maxim proposed a full-coverage path planning algorithm for multi-robots in the unknown environment, which does not need to obtain the global map information in advance, and the vehicles would not produce collisions with each other [65]. However, the random coverage strategy is used in this algorithm to traverse the operating area for each vehicle; hence, problems of the path clutter, the high repetition rate, and a not complete full-coverage path planning are induced.
The map building method based on sensor information is combined to achieve a complete full-coverage path planning for the vehicle. Parlaktuna developed a full-coverage path planning method based on the sensor system for multiple vehicles, where the generalized Voronoi diagram was applied for modeling and initializing a full-coverage path, and the path section is divided by the capacitated arc routing algorithm [66]. The full-coverage path planning is realized by the division of the vehicle navigation area; however, it only suits maps consisting of narrow paths such that the vehicle can cover the whole area through one-direction navigation and does not work well in a large space.
Based on the building map, many researchers have refined the full-coverage path planning method in the multi-vehicle system while resolving the collaboration problem, which is denoted as collaborating full-coverage problem. Janchiv applied cell decomposition to separate the operating area into several subareas and determine the suitable path planning result for each subarea. The vehicles can consume the least turning times and maintain a high efficiency to complete the full-coverage path navigation [67]. However, Janchiv's method did not consider the collaboration among the vehicle groups, and the method lacks proof of robustness. Rekletis introduced the boustrophedon cellular decomposition algorithm into the collaborating full-coverage path planning problem for multiple vehicles, where the domain decomposition method breaks the area and a greedy auction algorithm resolves the task assignment, as well as the collaboration of the vehicles [68]. This path planning method achieves the full coverage of the whole area, yet a large repetition of the navigated paths still cannot be avoided. Hazon proposed the multi-robots spanning-tree coverage algorithm (MSTC) that largely increased the robustness for the multiple vehicles to traverse the whole area, while it cannot guarantee the optimal coverage time [69]. Therefore, Zheng developed a multi-robots forest coverage (MFC) algorithm that realized the optimal coverage time [70].
With the advancement of intelligent algorithms, the full-coverage path planning method that can retune or optimize itself has been developed. For instance, Kapanoglu combined the genetic algorithm (GA) and template match approach into the collaborating full-coverage path planning problem, where GA is used to address the best match template for each single vehicle path planning such that both the fewest traversing paths and optimal coverage time can be promised, but the method lacks the adaption for dynamically changing environment, which is commonly seen for the underwater area [71]. The advantage of a bio-inspired neural network is to resolve the collaborating full-coverage path planning problem of ground cleaning robots, where each vehicle regards the others as obstacles such that the full-coverage with collision-free collaboration is realized. However, the large complexity of the neural network is still a big concern [72, 73].
Moreover, to increase the efficiency of the full-coverage traversing algorithm, studies related to target search algorithms based on probabilistic priority map have been proposed. For example, Cai developed a full-coverage path planning algorithm depending on the bio-innovation such as animal behaviors, but considering the probabilistic priority, where the efficiency is increased, the method yet is not highly adaptive to the changing environment [74]. Yao proposed full-coverage path planning methods depending on the probability map of targets, where intelligent methods such as biased min-consensus (BN-BMC) algorithm, Gaussian-based analysis, or SOM are combined [75-77].
Generally, most full-coverage path planning methods are applied to land or aerial vehicles rather than UUVs. The problems of not completing full coverage and high repetition routes usually occur during the navigation process. The studies on full-coverage path planning for the UUV in underwater environments are summarized in Table 3, which are still at the very early stage and attention has to be paid to the concerns of enhancing the efficiency of full coverage and decreasing the repetition rate.
Algorithms for UUV full-coverage path planning
| Random Coverage Strategy [65] | Traverse the operating area with multiple vehicles following the random coverage strategy | (1) No need of initial environmental information (2) Collision avoidance | (1) Not complete full-coverage (2) High repetition |
| Sensor-based map building method [66-69] | (1) Build the map based on sensor information (2) Apply the diagram algorithms for modeling and initialize a full-coverage path by dividing the path into sections accordingly | (1) Complete full-coverage (2) Consider multi-vehicle collaboration | (1) Only work for narrow paths (2) Complete full-coverage cannot be realized in conditions of broad area (3) Lack of robustness (4) Lack of optimal multi-vehicle task assignment (5) High repetition |
| Intelligent method-based full coverage path planning [71-73] | Apply intelligent methods such as GA or NN for each single vehicle path planning | (1) Complete full-coverage; (2) Collision avoidance due to self-regulation; (3) High efficiency of shortest covering time and lowest energy cost | (1) Low adaptiveness to the dynamic environment (GA) (2) Large computation (NN) |
| Probabilistic priority-based full coverage path planning [74-77] | Plan the path due to the predefined probabilistic priority | (1) Easy to implement (2) Complete full coverage (3) Increasing efficiency | Not adaptive to dynamic environment |
3. Technologies of UUV Tracking Control
Due to the complex environmental factors of the deep-water space, such as the high pressure, invisibility, or unpredictable obstacles, UUVs are applied in most cases when operating underwater to guarantee the safety and efficiency [2, 3, 78]. Therefore, achieving the robustness and accuracy of controlling the UUV to track the desired trajectory is dramatically important for completing the real-time underwater navigation [79, 80]. As mentioned in the Introduction, UUVs are mainly divided into ROV and AUV. ROV can be directly controlled through a control model for propagation, Robot operating system (ROS) modules, a visual processing pipeline, and a dashboard interface for the end-user, where the user gives commands remotely step by step [81]. This is known as remote control, and the ROV is controlled manually in this case, which is not the critical point of the section as the manual control strategy is direct and simple. For AUVs, the control is realized in an autonomous way, meaning the AUV has to recognize the surrounding areas and make the decision itself. Moreover, some ROVs also support the autonomous mode as a AUV, e.g., the "Falcon" ROV. Hence, in this review, the tracking control technologies emphasize the autonomy of UUVs, and applications on ROVs can also serve as examples of autonomous trajectory tracking control.
To realize the satisfactory trajectory tracking of the UUV, the vehicle must follow the desired path following the corresponding time period. In other words, the errors between the desired and actual trajectories have to be minimized at the different degrees of freedom [82]. However, different from common unmanned vehicles such as the land vehicle or the unmanned surface vehicle (USV), the UUV system contains more states, whose degrees of freedom (DOF) can be extended to six.
For the kinematic equation of the UUV, the velocity vector
where the velocity vector
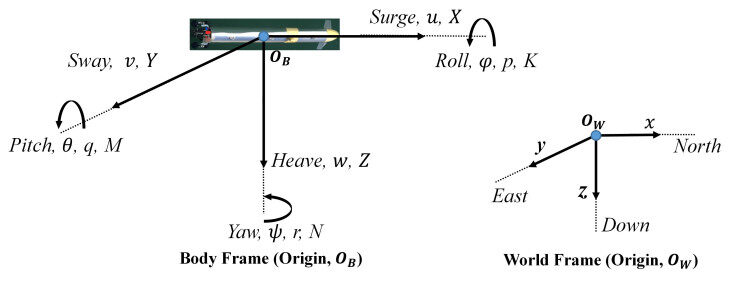
Figure 6. Degrees of freedom and corresponding axes for a UUV.
The transformation matrix
where
Among the six DOFs of the underwater vehicle, surge, sway, heave, roll, pitch, and yaw, roll and pitch can be neglected since these two DOFs barely have an influence on the underwater vehicle during practical navigation. Therefore, when establishing the trajectory tracking model to keep a controllable operation of the UUV, usually only four DOFs, namely surge, sway, heave, and yaw, are involved (see the DOFs shown in Figure 6). Hence, for the kinematic equation, the position vector can be simplified as
where
For UUVs, a generally accepted dynamic model has be defined as
where M is the inertia matrix of the summation of rigid body and added mass;
The torque vector of the thruster input is represented by
where
Due to the nonlinearity of the UUV system, the typical linearization method, i.e., proportion–integration–differentiation (PID) control, does not work very well and is less studied for UUV trajectory tracking [83]. Hence, in this section, the major methods that are used for UUV trajectory tracking are discussed and categorized into conventional control (consisting of backstepping control, sliding mode control, and model predictive control), intelligent control, and fault-tolerant control.
3.1. Conventional control
In this section, some conventional control methods such as backstepping control, sliding mode control, and model predictive control are described. Studies regarding their applications in the trajectory tracking control of the UUV are stated. The summary of the features for these conventional controls is given in Table 4.
Algorithms for UUV trajectory tracking
| Backstepping control [84-88] | Design control function by generating the subsystem established based on the Lyapunouv theorem | (1) Easy to implement for nonlinear system (2) Real-time reaction | (1) Unsatisfactory adaptiveness (2) Produce excessive speed references and actuator saturation problems |
| Sliding mode control [89-95] | (1) Suppose a sliding surface mode to follow the desired tracking (2) Keep the controlled outputs on the surface. | (1) Simple algorithm; (2) Robust. | Chattering issue |
| Model predictive control [96-99, 112] | (1) Resolve the online optimization problem in each timeslot and derive in-time predictions with minimum errors (2) Optimization algorithm embedded in the control system gives an optimized sequence within the pre-defined timeslot (3) The first result of the sequence is adopted as the solution and worked as the basis for the next optimization loop while time is receding | (1) High system accuracy not needed (2) In-time reaction (3) Adaptive | Long time consumption due to the recursive computation |
| Intelligent control[100-109](Fuzzy logic, NN, and GA) | (1) Embed intelligent algorithms as a search optimization for the desired tracking result; (2) Take searching cost as the objective function; (3) Optimization through iterations. | (1) Easy to implement; (2) Adaptive. | Large computation. |
3.1.1. Backstepping control
In the backstepping method, control functions for each subsystem are designed based on the Lyapunov techniques and generated to form the complete control law [84]. However, the actuator saturation is induced by the speed-jump problem, which usually occurs in the backstepping control methods for trajectory tracking [85]. The excessive speed references affect the robustness of the UUV trajectory tracking by introducing excessive fluctuations of velocities at initial states or other large error states during the kinematic controlling procedure. Therefore, a sharp speed change is derived from the large errors accumulated from the generation of the subsystems, where speed-jump issues are induced when the deviation occurs. As the UUV cannot provide infinite driving inputs such as torques/forces due to its underwater workspace and limited electric power, actuator saturation, has to be considered during the trajectory tracking process of the vehicle, with the torques/forces constraints applied[86-88].
3.1.2. Sliding mode control
As one of the most basic robust controlling strategies, sliding mode control (SMC) is widely used due to its simple and robust mechanism; hence, SMC is often chosen to construct the trajectory tracking controller of the vehicle [89, 90]. In SMC, a sliding surface mode is supposed to follow the desired tracking and keep the controlled outputs remaining on the surface. Once the controlled trajectory is out of the perfect sliding surface mode, SMC will push the trajectory slide back to the surface with addition or subtraction on the original controlling equation [91, 92]. Therefore, SMC restricts the fluctuation of controlled outputs in an acceptable range through a simple operation, which is highly applicable in trajectory tracking problems [93].
However, SMC suffers chattering issues, although it is robust to variable changes, which is a critical factor that needs to be considered when designing the control strategy [94]. Xu refined SMC with a bio-inspired neural network algorithm such that the chattering problem can be alleviated, but it is limited to the application of land vehicles where fewer degrees of freedom are involved [95].
3.1.3. Model predictive control
Model predictive control (MPC) is appropriate for the UUV system that navigates in the mode of slow velocity. MPC is not demanding on the model accuracy and provides in-time feedback, and constraints can be added to the control strategy to alleviate the jumps of the speed. Therefore, motivated by the requirements of in-time reaction and restriction of velocities within physical constraints throughout the whole tracking process, MPC control stands out to be one of the most feasible solutions for constructing the tracking control for the UUV [96].
The MPC resolves the online optimization problem at each timeslot and derives in-time predictions with minimum errors [97]. The optimization process performs a receding horizon in MPC. When deducing the solution of the next timeslot, the optimization algorithm embedded in the control system first gives an optimized sequence within a pre-defined timeslot. The first result of the sequence is adopted as the solution and works as the basis for the next optimization loop while time is receding [98]. At the same time, constraints are added in the optimization to set the limitation to the optimized results as well as the variation of the sequence results [97, 99]. By this receding optimization algorithm and the set constraints, online control can be realized and excessive velocity results are avoided. Sun et al. applied MPC as the vehicle trajectory tracking control, achieving satisfactory tracking results with fewer and gentler fluctuations, which demonstrates the effectiveness of MPC [85].
3.2. Intelligent control
Intelligent controls refer to the control strategies that can realize desired control goals without manual interventions, which are often used under situations of large uncertainties.
The fuzzy logic system is used as a component of the intelligent control, which addresses the uncertainties and gives a more flexible criterion for obtaining the optimized predictions within its conceptual framework [100, 101]. It can also limit the output data and smoothen the kinematic error curves derived from the conventional backstepping method through its decision function. Compared to MPC, the fuzzy logic controller constructs a model that imitates human decision-making with inputs of continuous values between 0 and 1, which largely simplifies the computing process [53, 54]. Some researchers have achieved successful tracking based on the fuzzy logic-refined backstepping method, yet their application is based on the underactuated surface vehicle (USV), with fewer states involved compared to the UUV [102]. Some researchers have applied synergetic learning in their controllers designed for vehicles and better performance is obtained, but they do not consider the practical constraints of the vehicle [103]. Li developed the fuzzy logic-based controller that provides satisfactory tracking results even with time-varying delays or input saturation, but the effectiveness of the algorithm on specific models such as the UUV has not been discussed [104]. Wang et al. developed a fuzzy logic-based backstepping method, yet it has not been experimented under specific application scenarios, with dynamic constraints applied [105].
As a typical intelligent method, the neural network-based models have been applied to the tracking control of the UUV for many years [2]. Due to the complex underwater work environment and limited electric power of UUVs, the excessive speed references as well as the actuator saturation problems have to be considered. The bio-inspired backstepping controller was introduced in the control design to give the resolution [87]. Based on the characteristics of the shunting model, the outputs of the control are bounded in a limited range with a smooth variation [106]. The bio-inspired backstepping controller has been applied to different UUVs under various conditions by combining with a sliding mode control that controls the dynamic component of the vehicle. An adaptive term is used in the sliding mode control to estimate the nonlinear uncertainties part and the disturbance of the underwater vehicle dynamics [107]. For example, the actuator saturation problem of a 7000 m manned submarine was resolved through this bio-inspired backstepping with sliding mode cascade control [108]. The control contains a kinematic controller that uses a bio-inspired backstepping control to eliminate the excessive speed references when the tracking error occurs at the initial state. Then, a sliding mode dynamic controller was proposed to reduce the lumped uncertainty in the dynamics of the UUV, thus realizing the adaptive trajectory tracking control without excessive speeds for the vehicle, as shown by the satisfactory curve and helix tracking results in Figure 7. Jiang accomplished the trajectory tracking of the autonomous vehicle in marine environments with a similar bio-inspired backstepping controller and adaptive integral sliding mode controller [109]. In the sliding mode controller, the chattering problem was alleviated, which increased the practical feasibility of the vehicle. However, more studies are needed to prove the effectiveness of the proposed control strategy, such as the tracking control based on the filtered backstepping method.
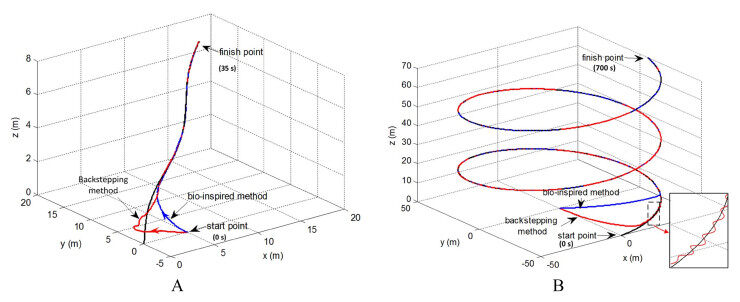
Figure 7. Tracking trajectory comparison of the bio-inspired model-based control and conventional backstepping control for the underwater robots: (A) curve tracking; and (B) helix tracking [108].
GA methods are also applied in the intelligent control of UUVs. They are usually applied based on the aim of addressing the most optimal solution during the control process owing to their feature of self-evolution. However, the computation cost of the GA methods always adds a burden to the tracking control algorithms such that they are usually combined with other intelligent algorithms to reach a more efficient control strategy. Tavanaei–Sereshki applied the quantum genetic algorithm (QGA), an optimization algorithm based on the probability that combines the idea of quantum computing and traditional genetic algorithm to realize the UUV's tracking along desired paths [110]. Zhang described a route planner that enables an AUV to selectively complete part of the predetermined tasks in the operating ocean area when the local path cost is stochastic through a greedy strategy-based GA (GGA), which includes a novel rebirth operator that maps infeasible individuals into the feasible solution space during evolution to improve the efficiency of the optimization and uses a differential evolution planner for providing the deterministic local path cost [111].
A brief summary of intelligent controls on UUVs can be found in Table 4. The details of various intelligent methods for tracking control of UUV are described in Section 3.2.
3.3. Fault-tolerant control
Regarding the unpredictability of the underwater environment, it is of high possibility for the UUV to meet unexpected accidents that affect the preset model of the vehicle. For example, in some cases, one or more of the UUV's thrusters are out of order, and the model needs to be modified to continue the desired trajectory tracking designed as before. Fault-tolerant control (FTC) is usually applied to alleviate abrupt errors and provides the most feasible solution when inevitable damages happen to the equipment in different fields [115]. However, the FTC of underwater vehicles has not been thoroughly investigated due to the complexity brought by the underwater environment and the UUV system [116-118].
Several techniques on the FTC have been developed in the 21st century [119-122]. Based on these studies, the design of the excessive number of thrusters compared to the number of degrees of freedom (DOF) is raised and accepted as a resolution to the UUV FTC problem, which is called the thruster control matrix reconfiguration [123, 124]. For example, as shown in Figure 8, the Falcon and URIS UUVs have five thrusters while only four DOFs are considered such that the reconfiguration method can be applied. For example, when an unexpected fault of the vehicle's thrusters occurs, the thrusters installed on the vehicle that exceed the number of DOFs (six, i.e., surge, sway, heave, row, pitch, and yaw) have enough flexible space to be retuned to provide the required propulsion in the corresponding DOFs. To implement the thruster control matrix configuration theory in practical cases, the weighted pseudo-inverse matrix method was proposed, where the fault cases are quantified as degrees of damage and serve as the inputs to form the thruster control matrix configuration model [125]. By this method, the process of the FTC is largely simplified, as the required thruster propulsion can be deduced directly through a weighted pseudo-inverse matrix model. Nevertheless, physical constraints of the thruster outputs are rarely considered, thus inducing the over-actuated vehicle issue [126, 127]. Additionally, among these studies, most of them work on eliminating the static errors induced by the fault cases. However, in UUV practical application, the realization of dynamic control on the vehicle's outputs in a real-time manner, which commonly refers to the trajectory tracking control for underwater vehicles, is of crucial importance [112, 128].
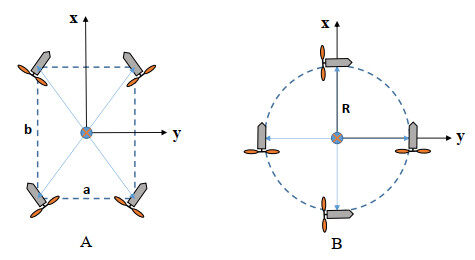
Figure 8. Two typical thruster configurations for the UUV: (A) Falcon UUV; and (B) URIS UUV.
4. Challenges and Prospects of UUV Motion Planning and Tracking Control
The motion planning and tracking control of the UUV has a promising future in the maritime projects of underwater rescue, detection, investigation, tube pavement, creature study, and military strategy. Hence, there is still a large requirement for thorough and systematic research in this field. In this section, the challenges and prospects of the UUV motion planning and tracking control for underwater navigation are listed and analyzed.
4.1. Multi-UUV collaboration
In this section, possible future studies on the multi-UUV collaboration are given, mainly divided into the multi-UUV collaboration considering the environmental effect and heterogeneous vehicles and the hunting of dynamic targets.
4.1.1. Environmental effect and heterogeneous vehicles
Most researchers discuss the UUV assignment in an ideal underwater environment and regard the vehicle as a pure particle, which lacks the consideration of the practical condition of the UUV operation. Therefore, the complex environmental factors such as ocean currents effect, unpredictable seamounts, and various moving obstacles should be involved in further studies. Moreover, the UUV system contains uncertainty that cannot be addressed initially, such that the heterogeneous vehicles of different model parameters, navigating velocities, or safe distance are required to be studied. In addition, the topics of the formation control of heterogeneous vehicles between UUVs and USVs (or even unmanned aerial vehicles) have become more attractive, as the USV can help to instruct the UUV in real-time positioning through its less-affected GPS system and efficient communication above the water surface [129, 130].
4.1.2. Dynamic targets
Most current UUV motion planning and tracking control studies concentrate on tackling static targets, such as the underwater search of crashed vehicles, yet the following or hunting of dynamic targets for UUVs is a crucial issue in the military defense for the marine system [131]. The following or hunting of dynamic targets covers the topics of dynamic task assignment, intelligence of the moving target, path planning while chasing the target, and containment of the target completed by the UUVs, which are still waiting to be further investigated.
4.2. Efficient underwater positioning and path planning
The developed underwater positioning methods of real-time efficiency are required, as the conventional positioning and navigating systems such as GPS are not valid due to the poor communication affected by the underwater environment. In addition, path planning in the underwater condition is the most vital part of UUV motion planning, where some innovative intelligent planning methods can be applied in this field to improve efficiency, such as reinforcement learning.
4.3. Robust underwater trajectory tracking
Owing to the complexity and uncertainty of the underwater environment and the nonlinear UUV system, the robustness of UUV trajectory tracking has to be advanced to guarantee the UUV navigates as desired. Therefore, the problems that affect the robustness of UUV trajectory tracking such as excessive speed references, actuator saturation, and thruster damages are worth investigating [132].
4.4. Real-time underwater recognition
Current approaches that can attain the identity information of the underwater targets are limited due to the low invisibility and unpredictable obstacles of the surrounding environment; the inefficient communication through the fluids in the deep-sea area also restricts the real-time recognition of the underwater target, thus affecting the real-time UUV navigation to unknown targets. Hence, the advanced underwater target detection techniques such as the multi-sensor information infusion approach and deep learning-based image recognition can be applied in this field to process and achieve the results in time [133-136].
5. Conclusion
The paper discusses the methodologies that can be applied to perform satisfactory UUV motion planning and tracking control, as well as the authors' thoughts on the benefits or drawbacks of these methods. In general, motion planning and tracking control for UUVs require the vehicle to realize an efficient and robust underwater operation of addressing and approaching the targets, with the optimal planned paths, task assignment among multiple vehicles, and robust trajectory tracking procedure. The framework and current investigations of UUV motion planning and tracking control are given in Sections 2 and 3. Moreover, although researchers have developed some effective methodologies on these topics, challenges remain to be resolved, which are listed in Section 4, together with the possible developments of UUV motion planning and tracking control technologies.
Declarations
Authors' contributions
Made substantial contributions to the research and investigation process, reviewed and summarized the literature, wrote and edited the original draft: Zhu D, Yan T
Performed oversight and leadership responsibility for the research activity planning and execution as well as developed ideas and provided critical review, commentary and revision: Yang SX
Availability of data and materials
Not applicable.
Financial support and sponsorship
This work was supported by the Natural Sciences and Engineering Research Council (NSERC) of Canada.
Conflicts of interest
All authors declared that there are no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2022.
REFERENCES
1. Gafurov SA, Klochkov EV. Autonomous unmanned underwater vehicles development tendencies. Procedia Eng 2015;106:141-8.
2. Li D, Wang P, Du L. Path planning technologies for autonomous underwater vehicles-a review. IEEE Access 2019;7:9745-68.
3. Burdinsky IN. Guidance algorithm for an autonomous unmanned underwater vehicle to a given target. Optoelectron Instrument Proc 2012;48:69-74.
4. Craven PJ, Sutton R, Burns RS. Control strategies for unmanned underwater vehicles. J Navigation 1998;51:79-105.
5. Skaddan R, Alhashemi N, Zaini M, Khuraishi M. Design of an improved decision search system for missing aircrafts: MH370 case study the deconstruction of houdini's greatest act. In: 2017 Systems and Information Engineering Design Symposium (SIEDS). Piscataway, NJ, USA; 2017. pp. 73-8.
6. Roberts GN, Sutton R. Advances in unmanned marine vehicles. Institution of Engineering and Technology 2006.
7. Sun P, Boukerche A. Modeling and analysis of coverage degree and target detection for autonomous underwater vehicle-based system. IEEE Trans Veh Technol 2018;67:9959-71.
8. Huang H, Tang Q, Li J, et al. A review on underwater autonomous environmental perception and target grasp, the challenge of robotic organism capture. Ocean Eng 2020;195.
9. Petillo S, Schmidt H. Exploiting adaptive and collaborative auv autonomy for detection and characterization of internal waves. IEEE J Ocean Eng 2014;39:150-64.
10. Panda M, Das B, Subudhi B, Pati BB. A comprehensive review of path planning algorithms for autonomous underwater vehicles. Int J Autom Comput 2020;17:321-52.
11. Hadi B, Khosravi A, Sarhadi P. A review of the path planning and formation control for multiple autonomous underwater vehicles. J Intell Robot Syst 2021;101.
12. Parker L. Heterogeneous multi-robot cooperation[Ph. D. Thesis]. Massachusetts Institute of Technology; 1994.,.
13. Kulkarni IS, Pompili D. Task allocation for networked autonomous underwater vehicles in critical missions. IEEE J Sel Areas Commun 2010;28:716-27.
14. Mataric MJ. Minimizing complexity in controlling a mobile robot population. In: Proceedings. 1992 IEEE International Conference on Robotics And Automation (Cat. No. 92CH3140-1). Los Alamitos, CA, USA; 1992. pp. 830-5.
15. Miyata N, Ota J, Arai T, Asama H. Cooperative transport by multiple mobile robots in unknown static environments associated with real-time task assignment. IEEE Trans Robot Autom 2002;18:769-80.
16. Turner RM. Context-mediated behavior for intelligent agents. International Journal of Human Computer Studies 1998;48:307-30.
17. Dia H. An agent-based approach to modelling driver route choice behaviour under the influence of real-time information. Transportation Research Part C: Emerging Technologies 2002;10:331-49.
18. Ahmed A, Patel A, Brown T, et al. Task assignment for a physical agent team via a dynamic forward/reverse auction mechanism. In: International Conference on Integration of Knowledge Intensive Multi-Agent Systems (IEEE Cat. No. 05EX1033). Piscataway, NJ, USA; 2005. pp. 311-7.
19. Akkiraju R, Keskinocak P, Murathy S, Wu F. An agent-based approach for scheduling multiple machines. Appl Intell, Int J Artif Intell Neural Netw Complex Probl-Solving Technol 2001;14:135-44.
20. Atkinson ML. Results analysis of using free market auctions to distribute control of UAVs. In: Collection of Technical Papers - AIAA 3rd "Unmanned-Unlimited" Technical Conference, Workshop, and Exhibit. vol. 2. Chicago, IL, United states; 2004. pp. 803-11.
21. Wahl T, Howell KC. Autonomous guidance algorithm for multiple spacecraft and formation reconfiguration maneuvers. In: Advances in the Astronautical Sciences. vol. 158. Napa, CA, United states; 2016. pp. 1939-56.,.
22. Yao P, Qi S. Obstacle-avoiding path planning for multiple autonomous underwater vehicles with simultaneous arrival. Sci China Technol Sci 2019;62:121-132.
23. Yao P, Zhao Z, Zhu Q. Path planning for autonomous underwater vehicles with simultaneous arrival in ocean environment. IEEE Systems Journal 2020;Sep; 14:3185-93.
24. Tolmidis AT, Petrou L. Multi-objective optimization for dynamic task allocation in a multi-robot system. Engineering Applications of Artificial Intelligence 2013;26:1458-68.
25. Boveiri HR. An incremental ant colony optimization based approach to task assignment to processors for multiprocessor scheduling. Front Inform Technol Electron Eng 2017;18:498-510.
26. Liu C, Kroll A. Memetic algorithms for optimal task allocation in multi-robot systems for inspection problems with cooperative tasks. Soft Comput 2015;19:567-84.
28. Zhu A, Yang SX. A neural network approach to dynamic task assignment of multirobots. IEEE Trans Neural Netw 2006;17:1278-87.
29. Zhu A, Yang SX. An improved SOM-based approach to dynamic task assignment of multi-robots. In: Proceedings of the World Congress on Intelligent Control and Automation (WCICA); 2010. pp. 2168-73.
30. Huang H, Zhu D, Ding F. Dynamic task assignment and path planning for multi-AUV system in variable ocean current environment. J Intell Robot Syst 2014;74:999-1012.
31. Chow B. Assigning closely spaced targets to multiple autonomous underwater vehicles[Ph. D. Thesis]. University of Waterloo; 2009.,.
32. Zhu D, Huang H, Yang SX. Dynamic task assignment and path planning of multi-AUV system based on an improved self-organizing map and velocity synthesis method in three-dimensional underwater workspace. IEEE Trans Cybern 2013;43:504-14.
33. D'Amato E, Nardi VA, Notaro I, Scordamaglia V. A Visibility Graph approach for path planning and real-time collision avoidance on maritime unmanned systems. In: 2021 IEEE International Workshop on Metrology for the Sea: Learning to Measure Sea Health Parameters, MetroSea 2021 - Proceedings. Virtual, Online, Italy; 2021. pp. 400-5.
34. Lam SK, Sridharan K, Srikanthan T. VLSI-efficient schemes for high-speed construction of tangent graph. Robot Auton Syst 2005;51:248-60.
35. Magid E, Lavrenov R, Svinin M, Khasianov A. Combining voronoi graph and spline-based approaches for a mobile robot path planning. In: Informatics in Control, Automation and Robotics. 14th International Conference, ICINCO 2017. Revised Selected Papers: Lecture Notes in Electrical Engineering (LNEE 495). Cham, Switzerland; 2020. pp. 475-96.,.
36. Wang J, Meng MQH. Optimal path planning using generalized voronoi graph and multiple potential functions. IEEE Trans Ind Electron 2020;67:10621-30.
37. Dijkstra E. Communication with an automatic computer[Ph. D. Thesis]. University of Amsterdam, Netherlands; 1959.,.
38. Peter EH, Nils JN, Bertram R. A formal basis for the heuristic determination of minimum cost paths. IEEE Transactions on Systems Science and Cybernetics 1968;SSC-4:100-7.
39. Wu Y, Low KH, Lv C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target. IEEE Trans Veh Technol 2020;69:6782-87.
40. Singh Y, Sharma S, Sutton R, Hatton D, Khan A. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean Engineering 2018;169:187-201.
41. Khatib O. Real-time obstacle avoidance for manipulators and mobile robots. In: Proceedings. 1985 IEEE International Conference on Robotics and Automation. vol. 2; 1985. pp. 500-5.
42. Zhu D, Yang SX. Path planning method for unmanned underwater vehicles eliminating effect of currents based on artificial potential field. J Navig 2021;74:955-67.
43. Ralli E, Hirzinger G. Fast path planning for robot manipulators using numerical potential fields in the configuration space. In: IROS '94. Proceedings of the IEEE/RSJ/GI International Conference on Intelligent Robots and Systems. Advanced Robotic Systems and the Real World (Cat. No. 94CH3447-0). vol. vol. 3. New York, NY, USA; 1994. pp. 1922-9.
44. Zhou Z, Wang J, Zhu Z, Yang D, Wu J. Tangent navigated robot path planning strategy using particle swarm optimized artificial potential field. Optik 2018;158:639-51.
45. Lin Z, Yue M, Wu X, Tian H. An improved artificial potential field method for path planning of mobile robot with subgoal adaptive selection. In: Intelligent Robotics and Applications. 12th International Conference, ICIRA 2019. Proceedings: Lecture Notes in Artificial Intelligence (LNAI 11740). vol. pt. I. Cham, Switzerland; 2019. pp. 211-20.
46. Xin L, Zhan-Qing W, Xu-Yang C. Path planning with improved artificial potential field method based on decision tree. In: 2020 27th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS). Piscataway, NJ, USA; 2020. p. 5 pp.
47. Abdur Rahman M, Abul Kalam Azad M. To escape local minimum problem for multi-agent path planning using improved artificial potential field-based regression search method. In: ACM International Conference Proceeding Series. Singapore, Singapore; 2017. pp. 371-6.
48. Alvarez A, Caiti A, Onken R. Evolutionary path planning for autonomous underwater vehicles in a variable ocean. IEEE J Oceanic Eng 2004;29:418-29.
49. Cheng CT, Fallahi K, Leung H, Tse CK. A genetic algorithm-inspired UUV path planner based on dynamic programming. IEEE Trans Syst Man Cybern, C, Appl Rev 2012;42:1128-34.
50. Ma YN, Gong YJ, Xiao CF, Gao Y, Zhang J. Path planning for autonomous underwater vehicles: an ant colony algorithm incorporating alarm pheromone. IEEE Trans Veh Technol 2019;68:141-54.
51. Han G, Zhou Z, Zhang T, et al. Ant-colony-based complete-coverage path-planning algorithm for underwater gliders in ocean areas with thermoclines. IEEE Trans Veh Technol 2020;69:8959-71.
52. Mo H, Xu L. Research of biogeography particle swarm optimization for robot path planning. Neurocomputing 2015;148:91-9.
53. Lee CC. Fuzzy logic in control systems: fuzzy logic controller. I. IEEE Trans Syst Man Cybern 1990;20:404-18.
54. Lee CC. Fuzzy logic in control systems: fuzzy logic controller. Ⅱ. IEEE Trans Syst Man Cybern 1990;20:419-35.
55. Kim YG, Bui LD. An obstacle-avoidance technique for autonomous underwater vehicles based on BK-products of fuzzy relation. Fuzzy Sets Syst 2006;157:560-77.
56. Ali F, Kim EK, Kim YG. Type-2 fuzzy ontology-based semantic knowledge for collision avoidance of autonomous underwater vehicles. Inf Sci 2015;295:441-64.
57. LeBlanc K, Saffiotti A. Multirobot object localization: a fuzzy fusion approach. IEEE Trans Syst Man Cybern B, Cybern 2009;39:1259-76.
58. Ling S. A real-time collision-free path planning of a rust removal robot using an improved neural network. J Shanghai Jiaotong Univ, Sci 2017;22:633-40.
59. Ghatee M, Mohades A. Motion planning in order to optimize the length and clearance applying a Hopfield neural network. Expert Syst Appl 2009;36:4688-95.
60. Li H, Yang SX, Biletskiy Y. Neural network based path planning for a multi-robot system with moving obstacles. In: 2008 IEEE International Conference on Automation Science and Engineering (CASE 2008). Piscataway, NJ, USA; 2008. pp. 163-8.
61. Zhu D, Yang SX. Bio-inspired neural network-based optimal path planning for UUVs under the effect of ocean currents. IEEE Trans Veh Technol 2021; doi: 10.1109/TIV.2021.3082151.
62. Noguchi Y, Maki T. Path planning method based on artificial potential field and reinforcement learning for intervention AUVs. In: 2019 IEEE Underwater Technology (UT). Piscataway, NJ, USA; 2019. pp. 1-6.
63. Li Z, Luo X. Autonomous underwater vehicles (AUVs) path planning based on Deep Reinforcement Learning. In: 2021 11th International Conference on Intelligent Control and Information Processing (ICICIP). Piscataway, NJ, USA; 2021. pp. 125-9.
64. Wang Z, Zhang S, Feng X, Sui Y. Autonomous underwater vehicle path planning based on actor-multi-critic reinforcement learning. Proc Inst Mech Eng, I, J Syst Control Eng 2021;235:1787-96.
65. Batalin MA, Sukhatme GS. Spreading out: a local approach to multi-robot coverage. In: Distributed Autonomous Robotic Systems 5. Tokyo; 2002. pp. 373-82.,.
66. Parlaktuna O, Sipahioglu A, Kirlik G, Yazici A. Multi-robot sensor-based coverage path planning using capacitated arc routing approach. In: 2009 IEEE International Conference on Control Applications (CCA). Piscataway, NJ, USA; 2009. pp. 1146-51.
67. Janchiv A, Batsaikhan D, Kim Gh, Lee SG. Complete coverage path planning for multi-robots based on. In: 2011 11th International Conference on Control, Automation and Systems; 2011. pp. 824-27.,.
68. Rekleitis I, New A, Rankin E, Choset H. Efficient boustrophedon multi-robot coverage: an algorithmic approach. Ann Math Artif Intell 2008;52:109-42.
69. Hazon N, Kaminka GA. On redundancy, efficiency, and robustness in coverage for multiple robots. Robotics and Autonomous Systems 2008;56:1102-14.
70. Zheng X, Koenig S. Robot coverage of terrain with non-uniform traversability. In: 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA; 2007. pp. 3757-64.
71. Kapanoglu M, Alikalfa M, Ozkan M, Yazici A, Parlaktuna O. A pattern-based genetic algorithm for multi-robot coverage path planning minimizing completion time. J Intell Manuf 2012;23:1035-45.
72. Yang SX, Luo C. A neural network approach to complete coverage path planning. IEEE Trans Syst Man Cybern B Cybern 2004;34:718-24.
73. Yao P, Zhao Z. Improved Glasius bio-inspired neural network for target search by multi-agents. Information Sci 2021;568:40-53.
74. Cai W, Zhang M, Zheng YR. Task assignment and path planning for multiple autonomous underwater vehicles using 3D dubins curves. Sensors 2017;17:1607-26.
75. Yao P, Qiu L, Qi J, Yang R. AUV path planning for coverage search of static target in ocean environment. Ocean Eng 2021;241.
76. Song D, Yao P. Search for static target in nonwide area by AUV: a prior data-driven strategy. IEEE Syst J 2021;15:3185-8.
77. Yao P, Zhu Q, Zhao R. Gaussian mixture model and self-organizing map neural-network-based coverage for target search in curve-shape area. IEEE Trans Cybern 2022;52:3971-83.
78. Sun P, Boukerche A. Modeling and analysis of coverage degree and target detection for autonomous underwater vehicle-based system. IEEE Trans Veh Technol 2018;67:9959-71.
79. Bacha S, Saadi R, Ayad MY, Aboubou A, Bahri M. A review on vehicle modeling and control technics used for autonomous vehicle path following. In: 2017 International Conference on Green Energy Conversion Systems (GECS). Piscataway, NJ, USA; 2017. pp. 1-6.
80. Liu X, Zhang M, Rogers E. Trajectory tracking control for autonomous underwater vehicles based on fuzzy re-planning of a local desired trajectory. IEEE Trans Veh Technol 2019;68:11657-67.
81. Ray S, Bhowal R, Patel P, Panaiyappan AK. An overview of the design and development of a 6 dof remotely operated vehicle for underwater structural inspection. In: 2021 International Conference on Communication, Control and Information Sciences (ICCISC). Piscataway, NJ, USA; 2021. pp. 1-6.
82. Shen C, Shi Y, Buckham B. Trajectory tracking control of an autonomous underwater vehicle using lyapunov-based model predictive control. IEEE Trans Ind Electron 2018;65:5796-805.
83. Li J, Xu Z, Zhu D, et al. Bio-inspired intelligence with applications to robotics: a survey. Intell Robot 2022;1:58-83.
84. Zhu D, Sun B. The bio-inspired model based hybrid sliding-mode tracking control for unmanned underwater vehicles. Eng Appl Artif Intell 2013;26:2260-9.
85. Sun B, Zhang W, Song A, Zhu X, Zhu D. Trajectory tracking and obstacle avoidance control of unmanned underwater vehicles based on MPC. In: IEEE 8th International Conference on Underwater System Technology: Theory and Applications (USYS). Piscataway, NJ, USA; 2018. pp. 1-6.
86. Wan L, Sun N, Liao YL. Backstepping control method for the trajectory tracking for the underactuated autonomous underwater vehicle. AMR2013; 798-799: 484-8.
87. Karkoub M, Wu HM, Hwang CL. Nonlinear trajectory-tracking control of an autonomous underwater vehicle. Ocean Eng 2017;145:188-98.
88. Yang SX, Meng MQH. Real-time collision-free motion planning of a mobile robot using a Neural Dynamics-based approach. IEEE Trans Neural Netw 2003;14:1541-52.
89. Li T, Zhao R, Chen CLP, Fang L, Liu C. Finite-time formation control of under-actuated ships using nonlinear sliding mode control. IEEE Trans Cybern 2018;48:3243-53.
90. Qin J, Zhang G, Zheng WX, Kang Y. Adaptive sliding mode consensus tracking for second-order nonlinear multiagent systems with actuator faults. IEEE Trans Cybern 2019;49:1605-15.
91. Zaihidee FM, Mekhilef S, Mubin M. Robust speed control of PMSM using sliding mode control (SMC)-a review. Energies 2019;12:1669-96.
92. Dhanasekar R, Ganesh Kumar S, Rivera M. Sliding mode control of electric drives/review. In: 2016 IEEE International Conference on Automatica (ICA-ACCA). Piscataway, NJ, USA; 2016. pp. 1-7.
93. Liu H, Zhang T. Fuzzy sliding mode control of robotic manipulators with kinematic and dynamic uncertainties. J DYN SYST-T ASME 2012;134.
94. Slotine JJE, Coetsee JA. Adaptive sliding controller synthesis for non-linear systems. Int J Control 1986;43:1631-51.
95. Xu Z, X Yang S, Gadsden SA, Li J, Zhu D. Backstepping and sliding mode control for AUVs aided with bioinspired neurodynamics. In: 2021 IEEE International Conference on Robotics and Automation (ICRA). Xi'an, China; 2021. pp. 2113-9.
96. Bai G, Meng Y, Liu L, Luo W, Gu Q. Review and comparison of path tracking based on model predictive control. Electronics, 2019, 8: 1077 (32 pp. ).
97. Dong L, Yan J, Yuan X, He H, Sun C. Functional nonlinear model predictive control based on adaptive dynamic programming. IEEE Trans Cybern 2019;49:4206-18.
98. Liu L, He Y, Han C. Review of model predictive control methods for time-delay systems. In: Proceedings of 2020 Chinese Intelligent Systems Conference. Lecture Notes in Electrical Engineering (LNEE 705). vol. 1. Singapore; 2021. pp. 624-33.
99. Gutierrez B, Kwak SS. Modular multilevel converters (MMCs) controlled by model predictive control with reduced calculation burden. IEEE Trans Power Electron 2018;33:9176-87.
100. Na J, Huang Y, Wu X, Su S, Li G. Adaptive finite-time fuzzy control of nonlinear active suspension systems with input delay. IEEE Trans Cybern 2020;50:2639-50.
101. Wang F, Chen B, Sun Y, Gao Y, Lin C. Finite-time fuzzy control of stochastic nonlinear systems. IEEE Trans Cybern 2020;50:2617-26.
102. Wang N, Karimi HR. Successive waypoints tracking of an underactuated surface vehicle. IEEE Trans Ind Inf 2020;16:898-908.
103. Hayashibe M, Shimoda S. Synergetic learning control paradigm for redundant robot to enhance error-energy index. IEEE Trans Cogn Dev Syst 2018;10:573-84.
104. Li Y, Tong S, Li T. Composite adaptive fuzzy output feedback control design for uncertain nonlinear strict-feedback systems with input saturation. IEEE Trans Cybern 2015;45:2299-308.
105. Wang H, Liu PX, Niu B. Robust fuzzy adaptive tracking control for nonaffine stochastic nonlinear switching systems. IEEE Trans Cybern 2018;48:2462-71.
106. Zhu D, Hua X, Sun B. A neurodynamics control strategy for real-time tracking control of autonomous underwater vehicle. J Navig 2013;67:113-27.
107. Sun B, Zhu D, Ding F, Yang SX. A novel tracking control approach for unmanned underwater vehicles based on bio-inspired neurodynamics. IJ Mar Sci Tech-japan 2012;18:63-74.
108. Sun B, Zhu D, Yang SX. A bioinspired filtered backstepping tracking control of 7000-m manned submarine vehicle. IEEE Trans Ind Electron 2014;61:3682-93.
109. Jiang Y, Guo C, Yu H. Robust trajectory tracking control for an underactuated autonomous underwater vehicle based on bioinspired neurodynamics. Int J Adv Robot Syst 2018;15:172988141880674.
110. Tavanaei-Sereshki Z, Ramezani-al MR. Quantum genetic sliding mode controller design for depth control of an underwater vehicle. Meas 2018;51:336-48.
111. Zhang J, Liu M, Zhang S, Zheng R. Robust global route planning for an autonomous underwater vehicle in a stochastic environment. Front Inf Technol Electron Eng 2022; doi: 10.1631/FITEE.2200026.
112. Shen C, Shi Y, Buckham B. Trajectory tracking control of an autonomous underwater vehicle using lyapunov-based model predictive control. IEEE Trans Ind Electron 2018;65:5796-5805.
113. Li D, Wang P, Du L. Path planning technologies for autonomous underwater vehicles-a review. IEEE Access 2019;7:9745-768.
114. Karkoub M, Wu HM, Hwang CL. Nonlinear trajectory-tracking control of an autonomous underwater vehicle. Ocean Eng 2017;145:188-98.
115. Cao X, Tian Y, Ji X, Qiu B. Fault-tolerant controller design for path following of the autonomous vehicle under the faults in braking actuators. IEEE Trans Transp Electrification 2021;7:2530-40.
116. Seto M, Svendsen K. Advanced AUV fault management. In: Autonomous Underwater Vehicles: Design and practice. The Institution of Engineering and Technology; 2020. pp. 419-45.,.
117. Kadiyam J, Parashar A, Mohan S, Deshmukh D. Actuator fault-tolerant control study of an underwater robot with four rotatable thrusters. Ocean Eng 2020;197.
118. Zhu G, Ma Y, Li Z, Malekian R, Sotelo M. Event-triggered adaptive neural fault-tolerant control of underactuated MSVs with input saturation. IEEE Trans Intell Transp Syst 2021; doi: 10.1109/TITS.2021.3066461.
119. Qi X, Qi J, Theilliol D, et al. A review on fault diagnosis and fault tolerant control methods for single-rotor aerial vehicles. J Intell Robot Syst 2014;73:535-55.
120. Li T, Li G, Zhao Q. Adaptive fault-tolerant stochastic shape control with application to particle distribution control. IEEE Trans Syst Man Cybern, Syst 2015;45:1592-1604.
121. Lu K, Xia Y, Yu C, Liu H. Finite-time tracking control of rigid spacecraft under actuator saturations and faults. IEEE Trans Autom Sci Eng 2016;13:368-81.
122. Meyer RT, Johnson SC, DeCarlo RA, Pekarek S, Sudhoff SD. Hybrid electric vehicle fault tolerant control. J Dyn Syst-T ASME 2018;140.
123. Martynova LA, Rozengauz MB. Approach to reconfiguration of a motion control system for an autonomous underwater vehicle. Gyroscopy Navig 2020;11:244-53.
124. Liu X, Zhang M, Yao F. Adaptive fault tolerant control and thruster fault reconstruction for autonomous underwater vehicle. Ocean Eng 2018;155:10-23.
125. Omerdic E, Roberts G. Thruster fault diagnosis and accommodation for open-frame underwater vehicles. Control Eng Pract 2004;12:1575-98.
126. Podder TK, Antonelli G, Sarkar N. Fault tolerant control of an autonomous underwater vehicle under thruster redundancy: simulations and experiments. In: Proc IEEE International Conference on Robotics and Automation (ICRA), 2000, 2: 1251-6.
127. Zhang S, Wu Y, He X, Liu Z. Cooperative fault-tolerant control for a mobile dual flexible manipulator with output constraints. IEEE Trans Autom Sci Eng 2021; doi: 10.1109/TASE.2021.3102588.
128. Wen Q, Kumar R, Huang J. Framework for optimal fault-tolerant control synthesis: maximize prefault while minimize post-fault behaviors. IEEE Trans Syst Man Cybern, Syst 2014;44:1056-66.
129. Stewart W, Weisler W, MacLeod M, et al. Design and demonstration of a seabird-inspired fixed-wing hybrid UAV-UUV system. Bioinsp Biomim 2018;13:056013-28.
130. Yang Q, Parasuraman R. Needs-driven heterogeneous multi-robot cooperation in rescue missions. In: IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). USA; 2020. pp. 252-59.
131. Liang H, Fu Y, Kang F, Gao J, Qiang N. A behavior-driven coordination control framework for target hunting by UUV intelligent swarm. IEEE Access 2020;8:4838-59.
132. Shen C, Buckham B, Shi Y. Modified C/GMRES algorithm for fast nonlinear model predictive tracking control of AUVs. IEEE Trans Control Syst Technol 2017;25:1896-1904.
133. Reed S, Ruiz IT, Capus C, Petillot Y. The fusion of large scale classified side-scan sonar image mosaics. IEEE Trans Image Process 2006;15:2049-60.
134. Coiras E, Mignotte PY, Petillot Y, Bell J, Lebart K. Supervised target detection and classification by training on augmented reality data. IET Radar Sonar Navig 2007;1:83-90.
135. Williams DP. Fast target detection in synthetic aperture sonar imagery: a new algorithm and large-scale performance analysis. IEEE J Ocean Eng 2015;40:71-92.
Cite This Article
Export citation file: BibTeX | RIS
OAE Style
Zhu D, Yan T, Yang SX. Motion planning and tracking control of unmanned underwater vehicles: technologies, challenges and prospects. Intell Robot 2022;2(3):200-22. http://dx.doi.org/10.20517/ir.2022.13
AMA Style
Zhu D, Yan T, Yang SX. Motion planning and tracking control of unmanned underwater vehicles: technologies, challenges and prospects. Intelligence & Robotics. 2022; 2(3): 200-22. http://dx.doi.org/10.20517/ir.2022.13
Chicago/Turabian Style
Zhu, Danjie, Tao Yan, Simon X. Yang. 2022. "Motion planning and tracking control of unmanned underwater vehicles: technologies, challenges and prospects" Intelligence & Robotics. 2, no.3: 200-22. http://dx.doi.org/10.20517/ir.2022.13
ACS Style
Zhu, D.; Yan T.; Yang SX. Motion planning and tracking control of unmanned underwater vehicles: technologies, challenges and prospects. Intell. Robot. 2022, 2, 200-22. http://dx.doi.org/10.20517/ir.2022.13
About This Article
Copyright

Data & Comments
Data


 Cite This Article 16 clicks
Cite This Article 16 clicks

 Like This Article 9
likes
Like This Article 9
likes







Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at support@oaepublish.com.